
目录
第1章 概述
人工智能定义:人工智能亦称机器智能,是指由人制造出来的机器所表现出来的智能。通常人工智能是指通过普通计算机程序的手段实现的类人智能技术。
三大学派:符号学派、连接学派、行为学派
从智能角度对人工智能的分类:
(1)(传统)专用人工智能:依葫芦画瓢、任务导向
(2)通用人工智能(跨领域人工智能):举一反三、从经验中学习
三种主流方法

第2章 逻辑与推理
2.1命题逻辑
命题逻辑:应用一套形式化规则对以符号表示的描述性陈述进行推理的系统。
原子命题(简单命题):不包含其他命题作为其组成部分的命题。
复合命题:若干原子命题可通过逻辑运算符来构成复合命题。
命题联结词
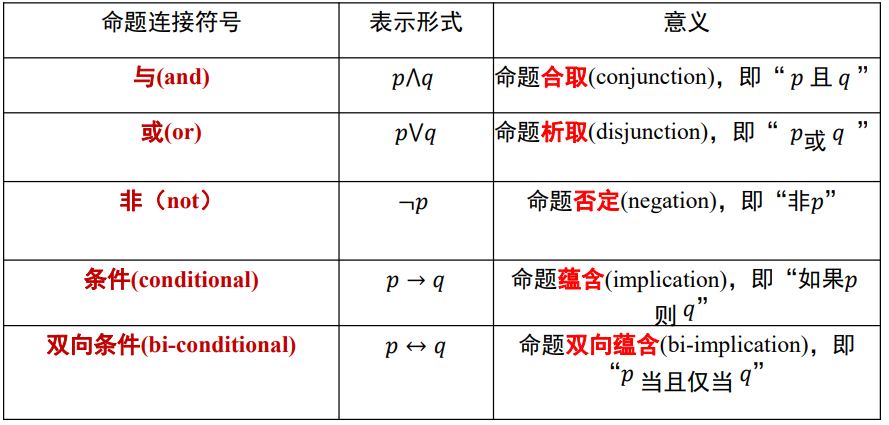

蕴涵关系:如果𝑝那么𝑞(𝑝 ⟶ 𝑞)(充分条件),命题q包含命题p(p是q的子集),若P不成立相当于P是空集,空集是任何集合的子集。
逻辑等价
逻辑等价:𝑝 ≡ q

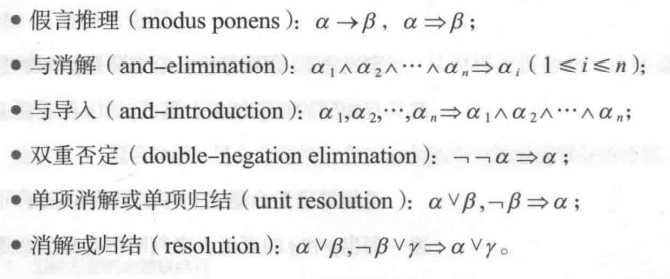
推理规则
鲁滨逊归结原理(消解原理):检查子句集 S 中是否包含空子句,若包含,则 S 不可满足。若不包含,在 S 中选择合适的子句进行归结,一旦归结出空子句,就说明 S 是不可满足的。
一般将所证结论取反(作为条件之一),推出空语句,从而取反的结论不成立,那么所证结论成立。
附加律:A ⇒ ( A ∨ B ) (如果A是对的,那么A ∨ B 也是对的)
化简律:( A ∧ B ) ⇒ A , ( A ∧ B ) ⇒ B
假言推理:(A→B)∧A⇒B
拒取式:( A → B ) ∧ ¬ B ⇒ ¬ A
析取三段论:( A ∨ B ) ∧¬A ⇒ B , ( A ∨ B ) ∧ ¬ B ⇒ A
( A ∨ B )是正确的 , 其中A是错误的 , 那么B肯定是正确的 ;
( A ∨ B )是正确的 , 其中B是错误的 , 那么A肯定是正确的 ;
假言三段论:( A → B )∧( B → C )⇒( A → C )
等价三段论:(A ↔ B )∧( B ↔ C )⇒( A ↔ C )
构造性两难:( A → B )∧( C → D )∧( A ∨ C )⇒( B ∨ D )
命题范式
⚫ 析取范式:有限个简单合取式构成的析取式称为析取范式 例𝛼 = 𝛼1 ∨ 𝛼2 ∨ ⋯ ∨ 𝛼k
⚫ 合取范式:有限个简单析取式构成的合取式称为合取范式 例𝛼 = 𝛼1 ∧ 𝛼2 ∧ ⋯ ∧ 𝛼k
*命题公式的析取范式与合取范式都不是唯一的
2.2 谓词逻辑与推理
⚫ 个体:个体的取值范围为个体域,个体可以是常量、变元或函数。谓词中可以有若干个个体变量
⚫ 谓词:用来刻画个体属性或者描述个体间关系存在性的元素,其值为真或假
*函数是从定义域到值域的映射;谓词是从定义域到{𝑇𝑟𝑢𝑒, 𝐹𝑎𝑙𝑠𝑒} 的映射
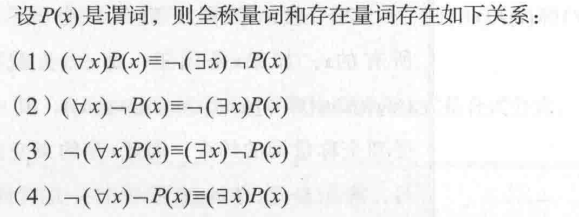
⚫ 量词:①全称量词:表示全体的 符号:∀ ②存在量词 表示存在 符号:∃
约束变元:受量词约束的变量符号 自由变元:不受量词约束的变量符号
合式公式(谓词公式):由逻辑联结词和原子公式构成,在合式公式中,连接词之间的优先级别是 ┓,∧,∨,→, ←→
谓词逻辑的推理规则:
⚫ 全称量词消去: (∀𝑥)𝐴(𝑥 )→ 𝐴(𝑦)
⚫ 全称量词引入: 𝐴(𝑦) → (∀𝑥)𝐴 𝑥
⚫ 存在量词消去: (∃𝑥)𝐴(𝑥) → 𝐴(𝑐)
⚫ 存在量词引入: 𝐴(c) → (∃𝑥)𝐴(𝑥)
2.3 知识表示与知识图谱
知识表示 知识的要素
• 事实:事物的分类、属性、事物间关系、科学事实、客观事实等。(最低层的知识)
• 规则:事物的行动、动作和联系的因果关系知识。(启发式规则)。
• 控制:当有多个动作同时被激活时,选择哪一个动作来执行的知识。(技巧性)
• 元知识:高层知识。怎样实用规则、解释规则、校验规则、解释程序结构等知识。
知识图谱
知识图谱由有向图构成。在图中,每个节点是一个实体(如人名、地名、事件和活动等),任意两个节点之间的边表示这两个节点之间存在的关系。
知识图谱推理 (inference) :通过机器学习等方法对知识图谱所蕴含关系进行挖掘。
知识图谱中任意两个相连节点及其 连 接 边 表 示 成 一 个 三 元 组 ( triplet ) , 即(left_node, relation, right_node) 这种三元组也可以表示为一阶逻辑(first order logic, FOL)的形式,从而为基于知识图谱的推理创造了条件
例如从<奥巴马,出生地,夏威夷>和<夏 威夷,属于,美国>两个三元组,可推理 得到<奥巴马,国籍,美国>
• 概念:层次化组织
• 实体:概念的示例化描述
• 属性:对概念或实体的描述信息
• 关系:概念或实体之间的关联
• 推理规则:可产生语义网络中上述新的元素
知识图谱推理:FOIL (First Order Inductive Learner)
正例+反例+背景知识⟹ 假设 (反例: 可从知识图谱中构造出来 背景知识:知识图谱中目标谓词以外的其他谓词实例化结果)
前提约束谓词 (学习得到)⟹ 目标谓词 (已知)

推理思路:从一般到特殊,逐步给目标谓词添加前提约束谓词,直到所构成的推理规则不覆盖任何反例。
依次将其它谓词(背景知识)加入到推理规则中作为前提约束谓词, 并计算所得到新推理规则的FOIL增益值。 基于计算所得FOIL增益值来选择最佳前提约束谓词。直到推理规则不覆盖任何反例(将信息增益最大的加入推理规则,将训练样例中与该推理规则不符的样例去掉)
给定目标谓词,FOIL算法从实例(正例、反 例、背景样例)出发,不断测试所得到推理规 则是否还包含反例,一旦不包含负例,则学习 结束,展示了 “归纳学习”能力。
2.4因果推理
辛普森悖论表明,在某些情况下,忽略潜在的“第三个变量”,可能会改变已有的结论
用来进行因果推理的模型:结构因果模型(因果模型)、因果图、贝叶斯网络
结构因果模型:由两组变量集合U和V以及一组函数f组成。(f是根据模型中其他变量而给V中每一个变量赋值的函数)
每个结构因果模型𝑀都与一个因果图𝐺相对应
有向无环图
有向无环图(DAG):有向无环图指的是一个无回路的有向图,即从图中任意一个节点出发经过任意条边,均无法回到该节点。有向无环图刻画了图中所有节点之间的依赖关系。DAG 可用于描述数据的生成机制。这样描述变量联合分布或者数据生成机制的模型,被称为 “贝叶斯网络”(Bayesian network)。


一个有向无环图唯一地决定了一个联合分布;反过来,一个联合分布不能唯一地决定有
向无环图。反过来的结论不成立。如联合分布𝑃(𝑋1, 𝑋2)= 𝑃(𝑥1)𝑃(𝑥2|𝑥1)=𝑃(𝑥2)𝑃(𝑥1|𝑥2)
𝐷-分离
𝐷-分离用于判断集合𝐴中变量是否与集合𝐵中变量相互独立(给定集合𝐶),
记为 𝐴 ⊥ 𝐵 | C

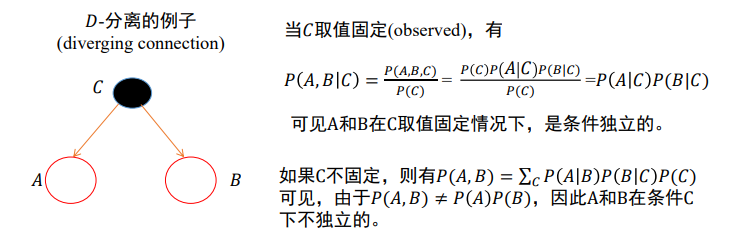

A是因 B是果 C是隐藏条件(类似辛普森悖论)
对于一个DAG图,如果𝐴、𝐵、𝐶是三个集合(可以是单独的节点或者是节点的集合),为了判断𝐴和𝐵 是否是 𝐶 条件独立的, 在DAG图中考虑所有𝐴和𝐵之间的路径(不管方向)。对于其中的一条路径,如果满足以下两个条件中的任意一条,则称这条路径是阻塞(block)的:
- 路径中存在某个节点𝑋是链结构𝐴 → 𝐶 → 𝐵或分连结构𝐴 ← 𝐶 → 𝐵中的节点、 且𝑋包含
在𝐶中 - 或者路径中存在某个节点𝑋是汇连结构𝐴 → 𝐶 ← 𝐵中节点,并且𝑋或𝑋 后代不包含在 C
中
如果𝑨和𝑩 之间所有路径都是阻塞的,那么𝑨和𝑩 就是关于 𝑪 条件独立的;否则𝑨和𝑩不是关于 C 条件独立

有向连接:两个节点间存在一条路径将这两个节点连通
有向分离:不存在这样的路径将这两个节点连通
第3章 搜索求解
3.1基本概念
一个搜索的问题通常包括如下的信息:状态空间、后继函数、起始状态和终点检测
搜索中需要解决的基本问题:
(1)是否一定能找到一个解。
(2)找到的解是否是最佳解。
(3)时间与空间复杂性如何。
(4)是否终止运行或是否会陷入一个死循环。
•状态空间:利用状态变量和操作符号,表示系统或问题的有关知识的符号体系,状态空间是一个四元组:



状态图:
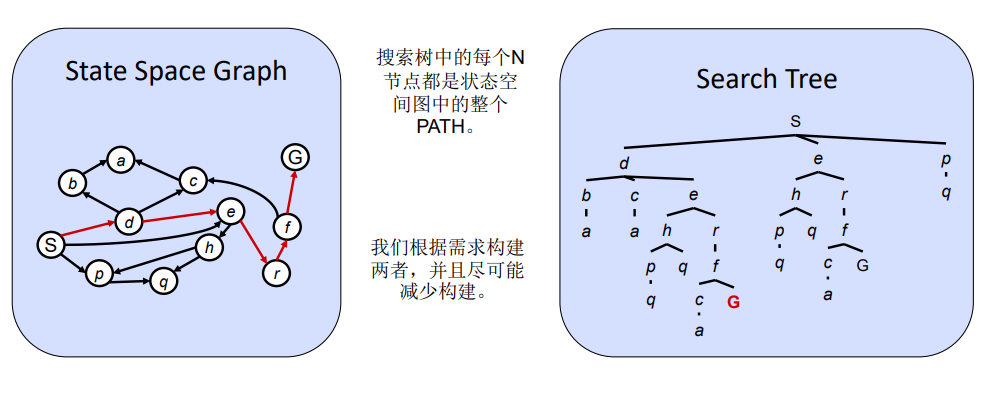
在状态空间图中,每个状态仅发生一次
我们很少会在内存中建立完整的图表(太大),但这是一个有用的想法
搜索树
树上反映的是可能的行动规划及其结果
• 开始的状态是根节点
• 子节点反映的是可能的动作结果
• 节点代表状态,但一个状态可能出现多次,反映的是不同行动规划的结果
• 对大多数问题,我们实际上很难建立整个搜索树
3.2盲目式搜索
在不具有对特定问题的任何有关信息的条件下,按固定的步骤(依次或随机调用操作算子)进行的搜索。
搜索树搜索
• 扩展树节点(寻找潜在的行动规划)
• 从搜素前沿(当前的所有叶节点)中考虑扩展:前沿代表了当前所有的规划部分
• 树节点扩展的越少越好
通用的数搜索伪码

关键元素:
• 搜索前沿
• 扩展操作
• 探索(选择)策略
主要问题:从哪些前沿叶节点开始搜索扩展
深度优先搜索(DFS)
策略:优先扩展一个最深的节点(若无解返回到上一个节点,然后从另一条路开始走到底)
实现:前沿是一个后进先出的栈
搜索树:b :最大分支数 • m :最大深度 • 解可能存在于不同深度

广度优先搜索(BFS)
策略:优先扩展最浅的节点
实现:前沿是一个先进先出的队列

基于成本的统一搜索
策略:(先进行广度搜索,在结果选择成本低的节点再做广度搜索,若无解返回到上一个节点,选择排除该节点后成本最低的节点进行扩展)扩展一个成本最低的节点
前沿用优先级队列存储(优先级:累计成本)

3.3启发式搜索
启发式策略:利用与问题有关的启发信息进行搜索。
评价函数 :从初始结点经过结点n到达目的结点的路径的最小代价估计值,其一般形式是
f(n)=g(n)+h(n)
g(𝑛)表示从起始节点到节点𝑛的开销代价值
ℎ(𝑛)表示从节点𝑛到目标节点路径中所估算的最小开销代价值(启发函数)
一般地,在f(n)中,g(𝑛)的比重越大,越倾向于宽度优先搜索方式,而ℎ(𝑛)的比重越大,表示启发性能越强
评价函数的作用:从当前节点出发来选择后续节点
贪婪最佳优先搜索
只扩展当前代价f(n)最小的节点
评价函数f(n)=h(n) 不考虑之前的开销
缺点:
①贪婪最佳优先搜索不是最优的
②启发函数代价最小化这一目标会对错误的起点比较敏感
③贪婪最佳优先搜索也是不完备的。
④最坏的情况下,贪婪最佳优先搜索的时间复杂度和空间复杂度都是O(𝑏𝑚),𝑏:节点的分支因子数目、𝑚:搜索空间的最大深度。
A*算法
结合统一搜索结合贪婪搜索
• 统一: 把路径成本排序,即来程的成本g(n)
• 贪婪: 排序按照与目标的临近性,即前程成本h(n)

为了保证A*算法是最优 (optimal) ,需要启发函数ℎ(𝑛)是可接受的和一致的(或者也称单调性)。
最优:不存在另外一个解法能得到比A*算法所求得解法具有更小开销代价。
完备:即它不会沿着一条无限的路径走下去而不回来做其他的选择尝试,可以找到最佳路径这一答案。
可接受的(可容性):专门针对启发函数而言,即启发函数不会过高估计从节点𝑛到目标结点之间的实际开销代价(即小于等于实际开销)。如可将两点之间的直线距离作为启发函数,从而保证其可接受。
一致的(单调性):假设节点𝑛的后续节点是𝑛′,则从𝑛到目标节点之间的开销代价一定小于从𝑛到𝑛′的开销再加上从𝑛′到目标节点之间的开销,即ℎ(𝑛) ≤ 𝑐(𝑛, 𝑎, 𝑛′) + ℎ(𝑛′) 。这里𝑛′是𝑛经过行动𝑎所抵达的后续节点, 𝑐(𝑛, 𝑎, 𝑛′) 指𝑛′和𝑛之间的开销代价。
- 如果函数满足一致性条件,则一定满足可接受条件;反之不然。
- 直线最短距离函数既是可接受的,也是一致的。
如果A*算法将节点n选择作为具有最小代价开销的路径中一个节点,则𝑛一定是最优路径中的一个节点。即最先被选中扩展的节点在最优路径中。
Tree-search 树搜索
Tree-search 完成一次扩展和前沿中的其它节点对比 始终选择最小的进行扩展 没有检测重复出现的状态,导致产生节点成树深度的指数增长。
Tree-search的A*算法中,如果启发函数ℎ(𝑛) 是可接受的,则A*算法是最优的和完备的;


Graph-search 图搜索
在Graph-search的A*算法中,如果启发函数ℎ(𝑛) 是一致的,A*算法是最优的。



3.4对抗搜索
最小最大搜索(Minimax Search):
给定一个游戏搜索树(max层和min层交替),minimax算法计算每个节点的minimax值来决定最优策略,MAX希望最大化minimax值(在max层选择最大值),而MIN则相反
该算法需要遍历所有的节点
性能:(b宽度 m深度)
• 时间: O(b^m)
• 空间: O(bm)
优点:
算法是一种简单有效的对抗搜索手段
在对手也“尽力而为”前提下,算法可返回最优结果
缺点:
如果搜索树极大,则无法在有效时间内返回结果
改善:
使用alpha-beta pruning算法来减少搜索节点
对节点进行采样、而非逐一搜索 (i.e.,MCTS)
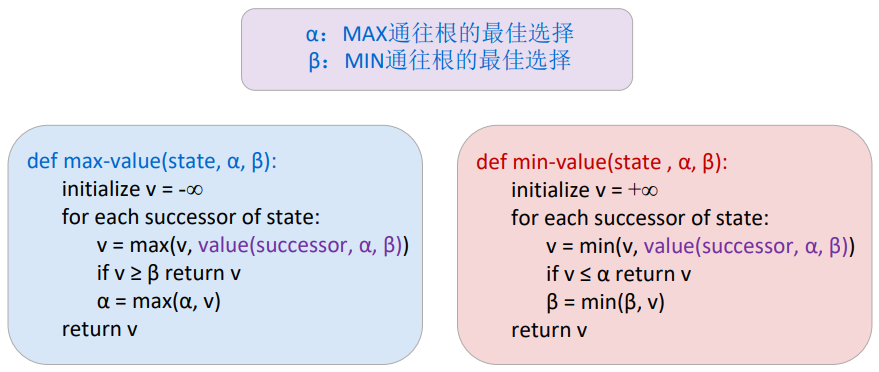
Alpha-Beta 剪枝搜索
max 方节点的当前最优值被称为α值(初始值:-∞),min 方节点的当前最优值被称为β 值(初始值:+∞)。在搜索过程中,max 节点使α 值递增,min 节点则使 β值递减,两者构成一个区间[ α ,β] ,这个区间被称为窗口。窗口的大小表示当前节点值得搜索的子节点的价值取值范围,向下搜索的过程就是缩小窗口的过程,最终的最优值将落在这个窗口中。
每个节点有两个值,分别是𝛼和𝛽。节点的𝛼和𝛽值在搜索过程中不断变化。其中,𝛼从负无穷大(−∞)逐渐增加、𝛽从正无穷大(∞)逐渐减少。如果一个节点中𝛼 > 𝛽,则该节点的后续节点可剪枝。

剪枝在大多数情况下会提高算法效率
第4章 监督学习
4.1机器学习
特征:是输入变量,“学习” 问题通常包括n个样本数据(训练样本),然后预测未知数据(测试样本)属性每个样本包含的多个属性(多维数据)。
标签:对事物的凭经验的分类。
样本:是指数据的特定实例。
机器学习:从原始数据中提取特征,学习一个映射函数f将特征映射到语义空间,寻找数据和任务目标间的关系。(是研究算法的过程,是用数据或经验E,研究在某些任务T中提高性能P的算法。)
监督学习的重要元素
模型:定义了特征与标签之间的关系
4.1.2机器学习的分类
监督学习,训练样本包含对应的“标签”,如识别问题
• 分类问题,样本标签属于两类或多类(离散)
• 回归问题,样本标签包括一个或多个连续变量(连续)
无监督学习,训练样本的属性不包含对应的“标签”,如聚类问题
半监督学习:依赖于部分被标注的数据
强化学习:一种序列数据决策学习方法,一般从环境交互中学习。
回归与分类的区别:回归与分类均是挖掘和学习输入变量和输出变量之间潜在关系模型,基于学习所得模
型将输入变量映射到输出变量
回归输出变量是连续的,分类输出变量是离散的
训练集&测试集:将数据集划分为训练集&测试集,从训练集学到映射函数f,并在测试集测试训练函数的准确性。
4.1.3监督学习
1)标注数据:标识了类别信息的数据
2)学习模型:如何学习得到映射模型
3)损失函数:对学习结果进行度量

损失函数
训练集中一共有𝑛个标注数据,第𝑖个标注数据记为(𝑥𝑖, 𝑦𝑖) ,其中第𝑖个样本数据为𝑥𝑖,𝑦𝑖是𝑥𝑖的标注信息。
从训练数据中学习得到的映射函数记为𝑓, 𝑓对𝑥𝑖的预测结果记为𝑓(𝑥𝑖) 。损失函数就是用来计算𝑥𝑖真实值𝑦𝑖 与预测值𝑓(𝑥𝑖)之间差值的函数。
训练过程中希望映射函数在训练数据集上得到 “损失”之和最小,即


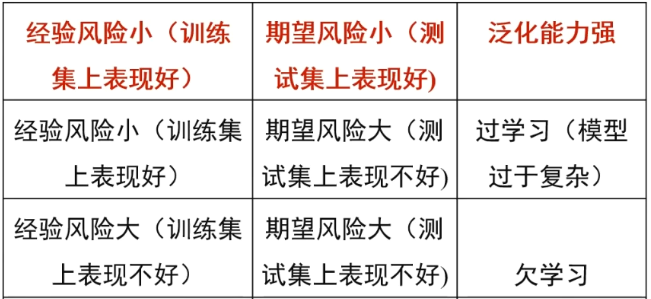
经验风险:训练集中数据产生的损失,经验风险越小说明学习模型对训练数据拟合程度越好。
期望风险:当测试集中存在无穷多数据时产生的损失,期望风险越小,学习所得模型越好。

过拟合(过学习)和欠拟合(欠学习)
结 构 风 险 最 小 化 :为了防止过拟合,在经验风险上加上表示模型复杂度的正 则 化 项 或 惩 罚 项:

监督学习两种方法:判别模型与生成模型
python scikit-learn使用流程

4.2线性回归

求解参数θ:
- 梯度下降法(一般数据量大时使用)
- 最小二乘法(一般数据量小时使用)
4.3逻辑回归
线性回归模型(直线)有时难以刻画数据的复杂分布,需要寻找非线性回归模型(曲线)





⚫对数几率回归模型的输出y可作为将输入数据
𝒙分类为某一类别概率的大小。
⚫ 输出值越接近1,说明输入数据𝒙分类为该类
别的可能性越大。与此相反,输出值越接近0,
输入数据𝒙不属于该类别的概率越大。
⚫ 根据具体应用设置一个阈值,将大于该阈值
的输入数据𝒙都归属到某个类别,小于该阈值
的输入数据𝒙都归属到另外一个类别。


4.5决策树
决策树是一种监督学习的分类方法,决策树是一种树形结构,其中每个非叶子结点表示对分类目标在某个属性上的判断,每个分支代表一个判断结果的输出,最后每个叶节点代表一种分类结果。
建立决策树过程:不断选择属性值对样本集进行划分,直到每个子样本为同一个类别。
贪婪策略:根据优化某些条件的属性测试划分记录。
属性类型 • Nominal(标称) • Ordinal(顺序) • Continuous(连续)
划分方式
(基于标称属性)
• 二元划分 :将属性值分成两个子集。因此需要找到最优划分的判决方法。
• 多元划分:输出数取决于该属性不同属性值个数。
(基于连续属性)
•离散化以形成有序分类属性
静态划分-算法开始时一次性固定好量化区间
动态划分-范围可以通过等宽法,等频率法,聚类。
• 二元决策: (A < v) or (A≥ v)
考虑所有可能的划分,找到最好的划分 • 可能需要更多的计算
如何确定最佳划分?
• 贪心算法:具有均匀类分布的节点优先(每个子节点数量相似)
节点杂质的度量
1.Gini Index(基尼系数)

基于GINI的拆分

2.基于熵的分割

3.基于INFO的拆分

4.6朴素贝叶斯

P(h):在没有训练数据前假设h拥有的初始概率(先验概率)
P(D)表示训练数据D的先验概率,P(D|h)表示假设h成立时D的概率
机器学习中,我们关心的是P(h|D),即给定D时h的成立的概率,(h的后验概率)
极大后验假设

极大似然假设

第5章 聚类
聚类任务:将大量数据根据他们的数据特征相似性分成少量簇的任务。
聚类算法目标:得到一个聚类结果,以最小化类内距离(或最大化类内相似度),而最大化类间距离(或最小化类间相似度)。
5.1 K均值聚类(K-means)
算法要求:特征变量连续,数据没有异常值。
算法目标:找到“局部最优”
伪码

1.初始化聚类质心
初始化K个聚类质心c={c1,c2,...ck},cj∈Rd(1≤j≤K),每个聚类质心cj所在集合记为Gj
d是属性,质心是该类所有点的平均值
初始化质心是随意的,所以该算法易受初始值影响很大。
2.对数据进行聚类
将每个聚类数据放入唯一一个聚类集合。
计算每个待聚类数据和K个聚类质心的距离。常用欧氏距离,计算Xi和Cj之间的距离![]() 将每个Xi放入与之距离最近的聚类质心所在的聚类集合
将每个Xi放入与之距离最近的聚类质心所在的聚类集合
3.更新聚类质心

5.2 DBSCAN
DBSCAN(具有噪声的基于密度的聚类方法)是一种基于密度的空间聚类算法。该算法将具有足够密度的区域划分为簇,并在具有噪声的空间数据库中发现任意形状的簇,它将簇定义为密度相连的点的最大集合。
密度:指定半径内的点数(Eps)
核心点(core point)如果一个点在Eps中的点数超过指定的点数(MinPts)
边界点(border point)在Eps中的点数少于MinPts,但位于核心点附近
伪码

Comments | NOTHING